串行算法介绍
QR分解
本次实验选择的是瘦高型矩阵的QR分解,具体而言是针对32列矩阵的QR分解。
QR分解是一种基本的矩阵分解方法。
对于一个实矩阵: $$ A \in R^{m \times n}, (m \geq n) $$ 可以将其分解为: $$ A = QR $$
其中:
- $Q \in R^{m\times n}:列正交矩阵$
- 满足$Q^TQ = I$
- $R\in R^{n\times n}:上三角矩阵$
算法步骤
采用MGS算法。
假设矩阵A的列为: $$ A = [a_0, a_1, …, a_{n-1}] $$ 我们要逐列构造: $$ Q = [q_0, q_1, …, q_{n-1}] $$
对每一列$a_j$:
- 初始化,
v = a_j. 即当前列作为起始向量。 - 去掉前面所有正交向量的分量,对所有$k = 0,1,\dots ,j-1$(即前面所有已经算了的列):
- 计算$v$在$q_k$上的长度:$R_{k,j} = q_k^Tv$.
- 计算$v$在$q_k$上的投影向量:$R_{k,j}q_k$.
- 得到垂直于$q_k$的$v$:$v = v-R_{k,j}q_k$.
- 计算当前向量的长度:$R_{j,j} = ||v||_2$.
- 归一化得到新的正交向量:$q_j = \frac{v}{R_{j,j}}$.
代码实现
以$256\times 36$的子矩阵做一次串行QR分解。
__global__ void tsqr_n32_float_simple(int m, float* A, int lda, float* R, int ldr)- m: 整个大矩阵的总行数,不是单个block的行数。
- A: 指向输入矩阵的首地址,矩阵按列主序存储。
- lda: 大矩阵的真实行跨度,即大矩阵的总行数。
- R: 输出矩阵R的批量存储区,大小$32\times 32$。
- ldr: R的行数。
constexpr int tsqr_n32_block_size = 256;
constexpr int n = 32;
constexpr float eps = 1e-12f;tsqr_n32_block_size: 每个QR子问题的矩阵大小为256.n: 本文是针对瘦高型矩阵,具体而言是针对32列矩阵写的Kernel.eps: 判断某一列是否退化的标准,如果某列正交化后范数太小,就认为这一列数值上接近0,不再归一化,而是直接置为0.
const int bx = blockIdx.x;确定当前block处理哪个矩阵。
例如:bx = 0:处理第 0 个 $256\times 32$;bx = 1:处理第 1 个 $256\times 32$.
if (threadIdx.x != 0 || threadIdx.y != 0) {
return;
}限制一个block中只有一个线程计算,确保串行。
也就是说,对于大小为$256\times 32$的子矩阵而言,只有一个线程参与计算,所有循环都是这个线程自己做。
A += bx * tsqr_n32_block_size;
R += bx * (n * n);移动全局指针,把他移动到当前block处理数据的起点。
const int block_size = min(tsqr_n32_block_size, m - bx * tsqr_n32_block_size);
if (block_size <= 0) return;考虑大矩阵行数不为 $256$ 的整倍数时,采用最后一组剩余的行数作为块的行数。
for (int j = 0; j < n; ++j) {
for (int i = 0; i < n; ++i) {
R[i + j * ldr] = 0.0f;
}
}健壮性,清空R矩阵。
R是列主序访问,所以$i+j\times ldr$表示R[i, j].
float v[tsqr_n32_block_size];这是一个临时向量,用来存储正在处理的一列。
在后续操作中:
- 原始列先拷贝到
v. - 在
v上逐步减去投影。 - 归一化后写回
A.
for (int j = 0; j < n; ++j)这是QR分解的主循环,我们对A采用列主序处理,所以遍历32次,每次处理256维的向量。
for (int i = 0; i < block_size; ++i) {
v[i] = A[i + j * lda];
}复制处理列到v.
for (int k = 0; k < j; ++k) {
...
}遍历当前列之前的列,用之前已经算完的正交向量,去掉当前列在这些方向上的分量,得到与之前所有正交向量正交的分量。
float dot = 0.0f;
for (int i = 0; i < block_size; ++i) {
dot += A[i + k * lda] * v[i];
}计算投影系数,即计算$R_{k,j} = q^T_kv$.
需要注意的是,这里的A[i + k * lda]已经不是原始的数值,而是已经完成处理后的列。
R[k + j * ldr] = dot;系数写入R,这里天然上三角,因为 k<j.
for (int i = 0; i < block_size; ++i) {
v[i] -= dot * A[i + k * lda];
}从v中减去这个方向的分量,即$v\leftarrow v-R_{k,j}q_k$.
此时v已经和第k列正交了。
float norm2 = 0.0f;
for (int i = 0; i < block_size; ++i) {
norm2 += v[i] * v[i];
}
float norm = sqrtf(norm2);
R[j + j * ldr] = norm;计算正交化向量的范数,即$||v||_2=\sqrt{\sum_iv_i^2}$.
把它存到R[j,j],这是归一化前的长度。
if (norm > eps) {
float inv = 1.0f / norm;
for (int i = 0; i < block_size; ++i) {
A[i + j * lda] = v[i] * inv;
}
}当norm比eps大的时候,就归一化$q_j = \frac{v}{||v||}$.
结果直接写回A的当前列,此时A逐步变成Q.
如果norm<=eps则v非常接近零向量,此时做除法会很危险,面对这种情况,我直接置为0.
kernel的总体代码如下:
__global__ void tsqr_n32_float_simple(int m, float* A, int lda, float* R, int ldr) {
constexpr int tsqr_n32_block_size = 256;
constexpr int n = 32;
constexpr float eps = 1e-12f;
const int bx = blockIdx.x;
if (threadIdx.x != 0 || threadIdx.y != 0) {
return;
}
A += bx * tsqr_n32_block_size;
R += bx * (n * n);
const int block_size = min(tsqr_n32_block_size, m - bx * tsqr_n32_block_size);
if (block_size <= 0) return;
for (int j = 0; j < n; ++j) {
for (int i = 0; i < n; ++i) {
R[i + j * ldr] = 0.0f;
}
}
float v[tsqr_n32_block_size];
for (int j = 0; j < n; ++j) {
for (int i = 0; i < block_size; ++i) {
v[i] = A[i + j * lda];
}
for (int k = 0; k < j; ++k) {
float dot = 0.0f;
for (int i = 0; i < block_size; ++i) {
dot += A[i + k * lda] * v[i];
}
R[k + j * ldr] = dot;
for (int i = 0; i < block_size; ++i) {
v[i] -= dot * A[i + k * lda];
}
}
float norm2 = 0.0f;
for (int i = 0; i < block_size; ++i) {
norm2 += v[i] * v[i];
}
float norm = sqrtf(norm2);
R[j + j * ldr] = norm;
if (norm > eps) {
float inv = 1.0f / norm;
for (int i = 0; i < block_size; ++i) {
A[i + j * lda] = v[i] * inv;
}
} else {
for (int i = 0; i < block_size; ++i) {
A[i + j * lda] = 0.0f;
}
}
}
}不过,该算法实际上还是有并行处理,只不过是以block同时为最大与最小单元并行,效率很低。
并行算法介绍
算法步骤
- 先把当前block处理的小矩阵搬运到片上临时空间。
- 逐列构造Householder向量。
- 用该反射向量去消掉当前列下面的元素,并同步更新右边所有列。
- 全部列处理完后,矩阵成为上三角矩阵,得到
R. - 在根据前面保存的Householder向量,反向累计恢复
Q. - 最后把
Q写回到原矩阵位置。
取出子矩阵
第一步是把子矩阵$A_{block} \in R^{m_b\times 32}$拷贝到局部工作区,所有QR操作都在这块区域进行。
构造Householder反射
对子矩阵的每一列,都做一次反射构造。
以col列为例,目标是把这一列从第col行往下的部分,变成一个只有首元素非零,其余元素都为零的形式:
$$
Hx = \begin{bmatrix} \pm|x| \ 0 \ \vdots \ 0 \end{bmatrix}
$$
直白点说,就是把当前列下面的元素全部变为0.
再直白一些,处理的是$x = A(col:m_b-1, col)$的数据,而不是一整列。
反射向量的构造如下:
- 设当前列尾部向量为$x$,计算它的2范数$||x||$.
- 计算$\alpha$: $\alpha = -sign(x_0)||x||$.
- 构造向量$u=x$,并修改$u$的第一个数值:$u_0 = u_0 - \alpha$.
- 归一化:$v = \frac{u}{||u||}$,$H = I - 2vv^T$.
但是需要指出的是,在代码里,实现的是$H=I-uu^T$,省一个除法,另外把scale融进去的话,应该还会减少一个指令。
在上述步骤完成后,当前col列对角线一下的元素从原始数据变成了Householder向量的存储区,且对角线位置对应的R(col, col)的值已经确定。
所以,子矩阵在此刻,不再是单纯的保留了原始数据,也不存完整的Q,而是上三角+Householder向量。
用当前反射更新右边所有列
构造出第col列的反射后,并不会只处理这一列,还要把这个反射施加到右边所有剩余列:
$$
A(:,j)\leftarrow HA(:,j), j>col
$$
假设我只把当前列下半打成0,但右边不更新,其实整个矩阵并没有完成等价变化。
QR分解的本质是对整个矩阵左乘一系列反射矩阵,即$R = H_{31}\dots H_{1}H_{0}A$.
如果当前Householder向量记为$u$,那么对任意后续列$x$,更新公式是$x\leftarrow x-u(u^Tx)$.
和之前串行算法用的MGS比起来,这里是施加一个整体反射,而MGS是逐个去掉旧的正基方向。
再说直白一些:
- 计算了当前列反射向量与目标列的内积
- 对目标列更新。
- 目标列完成对应的正交变换。
提取R
当所有列的Householder变换都做完了,局部矩阵的上三角部分就已经是最终的$R$.
所以,这一阶段只需要:
- 读出矩阵的上三角区域
- 写入$R$
- $R$下三角部分置为0.
根据Householder向量反向累积Q
$Q = H_0 H_1 \dots H_{31}$
恢复$Q$的方法是:
- 从单位矩阵的列向量出发;
- 按照Householder反射的顺序,把这些反射依次作用;
- 最后得到$Q$的每一列。
即,如果我有一组标准基向量:$e_0, e_1, \dots , e_{31}$,对每个基向量,依次施加所有Householder反射;得到$Q$的列向量。
$$ q_j = H_0H_1\dots H_{31}e_j $$
经过反向累积,得到了显示的$Q$.
把Q写回输出位置
前面恢复的Q协会原矩阵A对应的小矩阵block区域。
结果上看,输入的A,被覆盖为Q,R单独输出上三角矩阵。
代码实现
__global__ void tsqr_n32_float(int m, float* A, int lda, float* R, int ldr)这个kernel的目标是,在$A$中写回$Q$;$R$中写回$32\times 32$上三角矩阵。
constexpr int tsqr_n32_block_size = 256;
constexpr int tsqr_n32_n = 32;
constexpr int tsqr_n32_data_num_per_thread = 8;
constexpr int warp_size = 32;
constexpr float epsilon = 1e-4;tsqr_n32_blocksize: 每个block处理的行数。tsqr_n32_n: 这是在本次实验中限制的矩阵列数32,也是每个block处理的列数。tsqr_n32_data_num_per_thread: 每个线程处理处理8个元素。warp_size: 一个warp的线程数。epsilon: 用来判断是否退化置为0.
需要注意的是,一个block有32个warp,所以每个warp处理一列,共处理32列;一个warp有32个线程,处理256行1列元素,即256个元素,所以一个线程处理8个元素。
const int lane_id = threadIdx.x;
const int warp_id = threadIdx.y;
const int bx = blockIdx.x;lane_id: warp内线程的编号,即0~31.warp_id: 第几个warp,范围0~31.bx: 第几个block.
需要注意的是,这里的warp_id也表示为,当warp处理的第几列;而land_id,也会参与后续单列中,每个线程的起始位置。
A += bx * tsqr_n32_block_size;
R += bx * (tsqr_n32_n * tsqr_n32_n);移动全局指针:
A: 整个大矩阵是列主序存储,每个block只处理连续的256行。B: 每个block有独立的$32\times 32$输出矩阵,所以当前block的$R$起始地址往后挪对应数量的元素。
int block_size = min(tsqr_n32_block_size, m - bx * tsqr_n32_block_size);与串行实现相同,兼容非256整倍数行数的情形。
__shared__ float shared_A[tsqr_n32_block_size * tsqr_n32_n];申请一个$256\times 32$的共享内存数组。
所有后续的Householder分解、列更新、Q恢复,基本都在这块共享内存上完成。
#pragma unroll
for (auto i = 0; i < tsqr_n32_data_num_per_thread; ++i) {
auto row_idx = lane_id + i * warp_size;
if (row_idx < block_size) {
shared_A[row_idx + warp_id * tsqr_n32_block_size] = A[row_idx + warp_id * lda];
}
}
__syncthreads();接下来,将当前block对应的子矩阵的数据从A搬运到shared_A:
- 每个线程负责8个元素,所以循环8次;
- 考虑线程在warp中的位置:每组warp搬运256个元素,行号从0~256,每个线程负责8个位置,即$lane, lane+32, \dots, lane+224$.
- 接着考虑整个warp负责的block的位置:每个warp负责一整列,直接跨$warp_id * lda$.
最后使用__syncthreads()保证所有线程都完成搬运,再执行后续计算。
float q[tsqr_n32_data_num_per_thread];为每个线程申请一个长度8的寄存器数组。
在后续计算中,它将:
- 构造反射向量时,临时存储列片段;
- 更新右侧列时,临时存reflector对应的分量;
- 恢复Q,存Q列的局部片段。
for (auto col = 0; col < tsqr_n32_n; ++col)接下来要做Householder分解,每次循环处理一列,从左到右依次处理:
- 构造该列的Householder向量。
- 用这个反射去消掉该列下面元素。
- 把同样的反射作用到右边所有列。
float nu = 0.f;
if (warp_id == col)
{
...
}对warp处理的列进行限制。
#pragma unroll
for (auto i = 0; i < tsqr_n32_data_num_per_thread; ++i) {
auto row_idx = lane_id + i * warp_size;
if (row_idx >= col && row_idx < block_size) {
q[i] = shared_A[row_idx + col * tsqr_n32_block_size];
nu += q[i] * q[i];
}
}和串行的算法类似,我们只关注尾部向量。
float norm_square = warp_all_reduce_sum(nu);需要注意的是,由于每个线程只算了自己的8个元素的平方和,所以要以warp为单位,进行规约,求整列尾部向量的$||x||^2$.
warp_all_reduce_sum 在后续单独说明
if (norm_square > epsilon * epsilon) {
float norm = __fsqrt_rn(norm_square);
float scale = 1.f / norm;
...
}和串行算法类似,对范数大小进行验证,避免范数过小。
当范数足够大时,构造reflector. $$ norm = ||x|| \ scale = 1/||x|| $$
#pragma unroll
for (auto i = 0; i < tsqr_n32_data_num_per_thread; ++i) {
auto row_idx = lane_id + i * warp_size;
if (row_idx >= col && row_idx < block_size) {
q[i] *= scale;
}
}对当前向量归一化,这一步完成后q存的是$x/||x||$,也就是单位化后的当前列尾部向量。
float u1 = 0.f;
auto thread_off = col / warp_size;
if (lane_id == col % warp_size) {
q[thread_off] += (q[thread_off] >= 0) ? 1.f : -1.f;
u1 = q[thread_off];
R[col + ldr * col] = (u1 >= 0) ? -norm : norm;
}这几步是为了修改首元素,进而构造Householder方向。
其中col/warp_size是为了健壮性而写的:首元素不总是在q[0],一旦遇到超过warp_size的列数,就需要除法;但是本次实验针对的是固定的32列瘦高矩阵,所以thread_off永远为0.
为了确保reflector只修改首元素,必须找到哪个线程负责这个元素:首元素位于全局行号col,这个行号恰好落在col % 32,所以限制land_id与之相等。
随后执行的计算如下: $$ \hat{x}_0 \leftarrow \hat{x}_0 + sign(\hat{x}_0) $$
以构造Householder方向。
Householder反射后该列变为$[\pm ||x||, 0, \dots ]^T$.
把这里的对角元素写入R(col, col).
u1 = __shfl_sync(0xffffffff, u1, col % warp_size);当一个线程更新了首元素u1后,通过warp shuffle广播给同一warp内其他线程。
scale = __frsqrt_rn(fabs(u1));和串行算法类似,为了节省计算量,采用$H = I - uu^T$. 为此需要把刚构造出的向量再做一次缩放,把常数因子塞进u里。
#pragma unroll
for (auto i = 0; i < tsqr_n32_data_num_per_thread; ++i) {
auto row_idx = lane_id + i * warp_size;
if (row_idx >= col && row_idx < block_size) {
shared_A[row_idx + col * tsqr_n32_block_size] = q[i] * scale;
}
}把Householder向量写回shared_a当前列尾部。
这一步结束后,shared_A(:, col)从col往下部分,不再是原矩阵数据,而是reflector向量u.
在之前讨论的是没有退化的处理,现在说明退化的处理:
} else {
if (lane_id == col) { R[col + ldr * col] = 0.f; }
#pragma unroll
for (auto i = 0; i < tsqr_n32_data_num_per_thread; ++i) {
auto row_idx = lane_id + i * warp_size;
if (row_idx >= col && row_idx < block_size) {
shared_A[row_idx + col * tsqr_n32_block_size] = 0.f;
}
}
}尾部向量近似为0,此刻无法构造有效的reflector,此时将R(col, col)置为0,reflector置为0,相当于跳过这一次反射。
__syncthreads();当前列是warp_id == col的warp写到了shared_a(:, col). 接下来其他warp要用它取更新右侧的列,在此之前进行一个block级的同步。
if (col < warp_id) { ... }确定只有当前列的右侧更新,例如第五例reflector算完,就更新6~31列。
float nu = 0.f;
#pragma unroll
for (auto i = 0; i < tsqr_n32_data_num_per_thread; ++i) {
auto row_idx = lane_id + i * warp_size;
if (row_idx >= col && row_idx < block_size) {
q[i] = shared_A[row_idx + col * tsqr_n32_block_size];
nu += q[i] * shared_A[row_idx + warp_id * tsqr_n32_block_size];
}
}
float utx = warp_all_reduce_sum(nu);q[i]: 读当前reflector向量u对应的单个数字.shared_A[row_idx + warp_id * tsqr_n32_block_size]: 待更新的列的单个数字。
所以累计的结果为$u^Tx$。
#pragma unroll
for (auto i = 0; i < tsqr_n32_data_num_per_thread; ++i) {
auto row_idx = lane_id + i * warp_size;
if (row_idx >= col && row_idx < block_size) {
shared_A[row_idx + warp_id * tsqr_n32_block_size] -= utx * q[i];
}
}更新目标列:$x\leftarrow x - u(u^Tx)$.
主循环全部结束后,再做一次block同步。
随后准备利用reflector恢复Q.
if (lane_id < warp_id) {
R[lane_id + ldr * warp_id] = shared_A[lane_id + warp_id * tsqr_n32_block_size];
shared_A[lane_id + warp_id * tsqr_n32_block_size] = 0.f;
}
if (lane_id > warp_id) {
R[lane_id + ldr * warp_id] = 0.f;
}当lane_id<warp_id是,处于上三角区域,拷贝到R.
否则,直接写0.
另外,顺便把shared_A的上三角清零,因为,后面恢复Q只需要reflector信息,清个零更干净。
#pragma unroll
for (auto i = 0; i < tsqr_n32_data_num_per_thread; ++i) {
auto row_idx = lane_id + i * warp_size;
q[i] = (row_idx == warp_id) ? 1.f : 0.f;
}
__syncwarp();为了恢复Q,每个warp先把自己初始化成标准基向量,例如warp0对应$e_0$.
也就是说,每个warp手里存Q的某一列初始值。
for (auto col = tsqr_n32_n - 1; col >= 0; --col)
{
...
}恢复Q时,reflector按逆序应用,即$Q = H_0H_1\dots H_{31}$.
if (warp_id >= col) { ... }第col个reflector只作用于当前col以后的Q列。
float nu = 0.f;
#pragma unroll
for (auto i = 0; i < tsqr_n32_data_num_per_thread; ++i) {
auto row_idx = lane_id + i * warp_size;
if (row_idx < block_size) {
nu += q[i] * shared_A[row_idx + col * tsqr_n32_block_size];
}
}
float utq = warp_all_reduce_sum(nu);q[i]是当前warp正在恢复的Q的一列。shared_A[row_idx + col * tsqr_n32_block_size]是第col个reflector向量。
也就是求$u^Tq$
#pragma unroll
for (auto i = 0; i < tsqr_n32_data_num_per_thread; ++i) {
auto row_idx = lane_id + i * warp_size;
if (row_idx < block_size) {
q[i] -= utq * shared_A[row_idx + col * tsqr_n32_block_size];
}
}
__syncwarp();计算:$q\leftarrow q-u(u^Tq)$.
直白点就是把第col个reflector作用到当前Q列。
#pragma unroll
for (auto i = 0; i < tsqr_n32_data_num_per_thread; ++i) {
auto row_idx = lane_id + i * warp_size;
if (row_idx < block_size) {
A[row_idx + warp_id * lda] = q[i];
}
}写回A,和最初写入shared_A类似。
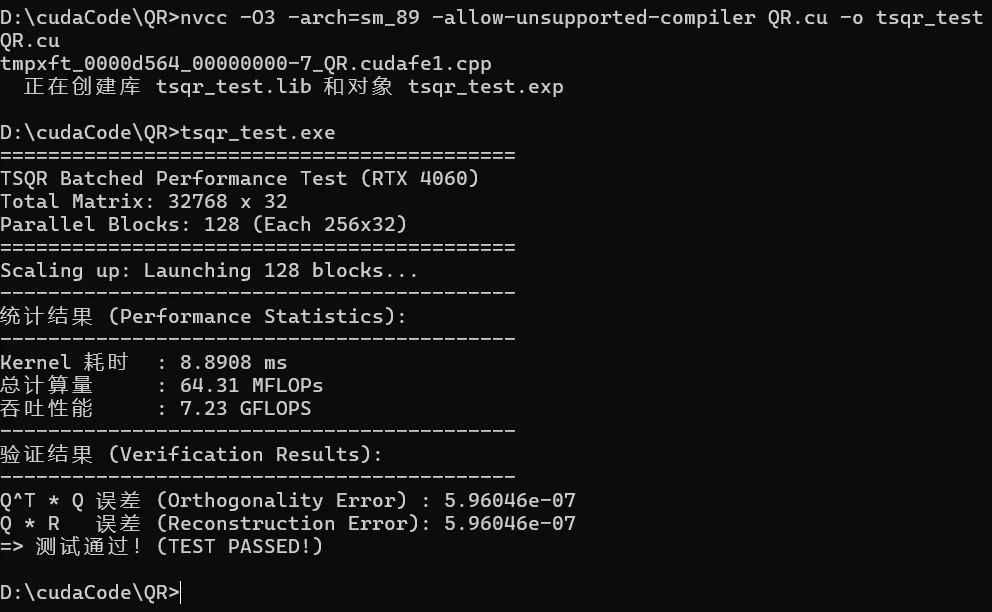
测试结果
串行算法:
 并行算法:
并行算法:
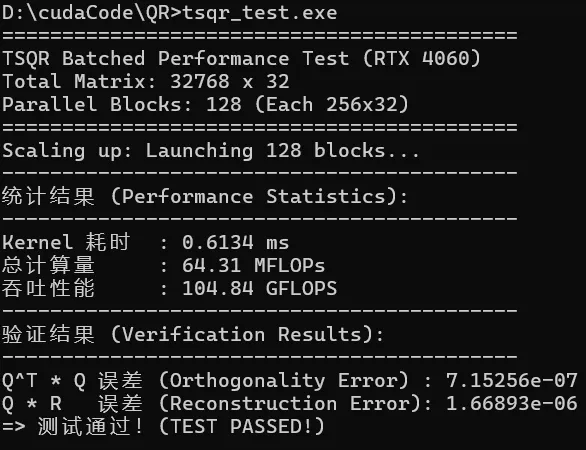
可以看到后者效率非常高,一方面不仅实现了线程级的并行;此外,Householder更新是列操作,适合warp内做归约计算内积,并并行更新,后者具有更高的并行度,更少的全局内存访存,更高效的共享内存使用。
整体代码如下:
#include <iostream>
#include <vector>
#include <cmath>
#include <random>
#include <cuda_runtime.h>
#define CHECK_CUDA(call) { \
cudaError_t err = call; \
if (err != cudaSuccess) { \
std::cerr << "CUDA Error: " << cudaGetErrorString(err) << " at line " << __LINE__ << std::endl; \
exit(1); \
} \
}
template <typename T>
static __inline__ __device__ T warp_all_reduce_sum(T val) {
for (int mask = warpSize / 2; mask > 0; mask /= 2) {
val += __shfl_xor_sync(0xffffffff, val, mask);
}
return val;
}
__global__ void tsqr_n32_float(int m, float* A, int lda, float* R, int ldr) {
constexpr int tsqr_n32_block_size = 256;
constexpr int tsqr_n32_n = 32;
constexpr int tsqr_n32_data_num_per_thread = 8;
constexpr int warp_size = 32;
constexpr float epsilon = 1e-4;
const int lane_id = threadIdx.x;
const int warp_id = threadIdx.y;
const int bx = blockIdx.x;
A += bx * tsqr_n32_block_size;
R += bx * (tsqr_n32_n * tsqr_n32_n);
int block_size = min(tsqr_n32_block_size, m - bx * tsqr_n32_block_size);
__shared__ float shared_A[tsqr_n32_block_size * tsqr_n32_n];
#pragma unroll
for (auto i = 0; i < tsqr_n32_data_num_per_thread; ++i) {
auto row_idx = lane_id + i * warp_size;
if (row_idx < block_size) {
shared_A[row_idx + warp_id * tsqr_n32_block_size] = A[row_idx + warp_id * lda];
}
}
__syncthreads();
float q[tsqr_n32_data_num_per_thread];
for (auto col = 0; col < tsqr_n32_n; ++col) {
float nu = 0.f;
if (warp_id == col) {
#pragma unroll
for (auto i = 0; i < tsqr_n32_data_num_per_thread; ++i) {
auto row_idx = lane_id + i * warp_size;
if (row_idx >= col && row_idx < block_size) {
q[i] = shared_A[row_idx + col * tsqr_n32_block_size];
nu += q[i] * q[i];
}
}
float norm_square = warp_all_reduce_sum(nu);
if (norm_square > epsilon * epsilon) {
float norm = __fsqrt_rn(norm_square);
float scale = 1.f / norm;
#pragma unroll
for (auto i = 0; i < tsqr_n32_data_num_per_thread; ++i) {
auto row_idx = lane_id + i * warp_size;
if (row_idx >= col && row_idx < block_size) {
q[i] *= scale;
}
}
float u1 = 0.f;
auto thread_off = col / warp_size;
if (lane_id == col % warp_size) {
q[thread_off] += (q[thread_off] >= 0) ? 1.f : -1.f;
u1 = q[thread_off];
R[col + ldr * col] = (u1 >= 0) ? -norm : norm;
}
u1 = __shfl_sync(0xffffffff, u1, col % warp_size);
scale = __frsqrt_rn(fabs(u1));
#pragma unroll
for (auto i = 0; i < tsqr_n32_data_num_per_thread; ++i) {
auto row_idx = lane_id + i * warp_size;
if (row_idx >= col && row_idx < block_size) {
shared_A[row_idx + col * tsqr_n32_block_size] = q[i] * scale;
}
}
} else {
if (lane_id == col) { R[col + ldr * col] = 0.f; }
#pragma unroll
for (auto i = 0; i < tsqr_n32_data_num_per_thread; ++i) {
auto row_idx = lane_id + i * warp_size;
if (row_idx >= col && row_idx < block_size) {
shared_A[row_idx + col * tsqr_n32_block_size] = 0.f;
}
}
}
}
__syncthreads();
if (col < warp_id) {
float nu = 0.f;
#pragma unroll
for (auto i = 0; i < tsqr_n32_data_num_per_thread; ++i) {
auto row_idx = lane_id + i * warp_size;
if (row_idx >= col && row_idx < block_size) {
q[i] = shared_A[row_idx + col * tsqr_n32_block_size];
nu += q[i] * shared_A[row_idx + warp_id * tsqr_n32_block_size];
}
}
float utx = warp_all_reduce_sum(nu);
#pragma unroll
for (auto i = 0; i < tsqr_n32_data_num_per_thread; ++i) {
auto row_idx = lane_id + i * warp_size;
if (row_idx >= col && row_idx < block_size) {
shared_A[row_idx + warp_id * tsqr_n32_block_size] -= utx * q[i];
}
}
}
}
__syncthreads();
if (lane_id < warp_id) {
R[lane_id + ldr * warp_id] = shared_A[lane_id + warp_id * tsqr_n32_block_size];
shared_A[lane_id + warp_id * tsqr_n32_block_size] = 0.f;
}
if (lane_id > warp_id) {
R[lane_id + ldr * warp_id] = 0.f;
}
#pragma unroll
for (auto i = 0; i < tsqr_n32_data_num_per_thread; ++i) {
auto row_idx = lane_id + i * warp_size;
q[i] = (row_idx == warp_id) ? 1.f : 0.f;
}
__syncwarp();
for (auto col = tsqr_n32_n - 1; col >= 0; --col) {
if (warp_id >= col) {
float nu = 0.f;
#pragma unroll
for (auto i = 0; i < tsqr_n32_data_num_per_thread; ++i) {
auto row_idx = lane_id + i * warp_size;
if (row_idx < block_size) {
nu += q[i] * shared_A[row_idx + col * tsqr_n32_block_size];
}
}
float utq = warp_all_reduce_sum(nu);
#pragma unroll
for (auto i = 0; i < tsqr_n32_data_num_per_thread; ++i) {
auto row_idx = lane_id + i * warp_size;
if (row_idx < block_size) {
q[i] -= utq * shared_A[row_idx + col * tsqr_n32_block_size];
}
}
__syncwarp();
}
}
#pragma unroll
for (auto i = 0; i < tsqr_n32_data_num_per_thread; ++i) {
auto row_idx = lane_id + i * warp_size;
if (row_idx < block_size) {
A[row_idx + warp_id * lda] = q[i];
}
}
}
__global__ void tsqr_n32_float_simple(int m, float* A, int lda, float* R, int ldr) {
constexpr int tsqr_n32_block_size = 256;
constexpr int n = 32;
constexpr float eps = 1e-12f;
const int bx = blockIdx.x;
if (threadIdx.x != 0 || threadIdx.y != 0) {
return;
}
A += bx * tsqr_n32_block_size;
R += bx * (n * n);
const int block_size = min(tsqr_n32_block_size, m - bx * tsqr_n32_block_size);
if (block_size <= 0) return;
for (int j = 0; j < n; ++j) {
for (int i = 0; i < n; ++i) {
R[i + j * ldr] = 0.0f;
}
}
float v[tsqr_n32_block_size];
for (int j = 0; j < n; ++j) {
for (int i = 0; i < block_size; ++i) {
v[i] = A[i + j * lda];
}
for (int k = 0; k < j; ++k) {
float dot = 0.0f;
for (int i = 0; i < block_size; ++i) {
dot += A[i + k * lda] * v[i];
}
R[k + j * ldr] = dot;
for (int i = 0; i < block_size; ++i) {
v[i] -= dot * A[i + k * lda];
}
}
float norm2 = 0.0f;
for (int i = 0; i < block_size; ++i) {
norm2 += v[i] * v[i];
}
float norm = sqrtf(norm2);
R[j + j * ldr] = norm;
if (norm > eps) {
float inv = 1.0f / norm;
for (int i = 0; i < block_size; ++i) {
A[i + j * lda] = v[i] * inv;
}
} else {
for (int i = 0; i < block_size; ++i) {
A[i + j * lda] = 0.0f;
}
}
}
}
void verify_qr_decomposition(const std::vector<float>& A_orig,
const std::vector<float>& Q,
const std::vector<float>& R,
int m, int n) {
float max_err_qtq = 0.0f;
float max_err_qr = 0.0f;
for (int i = 0; i < n; ++i) {
for (int j = 0; j < n; ++j) {
float sum = 0.0f;
for (int k = 0; k < m; ++k) {
sum += Q[k + i * m] * Q[k + j * m];
}
float target = (i == j) ? 1.0f : 0.0f;
max_err_qtq = std::max(max_err_qtq, std::abs(sum - target));
}
}
for (int i = 0; i < m; ++i) {
for (int j = 0; j < n; ++j) {
float sum = 0.0f;
for (int k = 0; k <= j; ++k) {
sum += Q[i + k * m] * R[k + j * n];
}
max_err_qr = std::max(max_err_qr, std::abs(sum - A_orig[i + j * m]));
}
}
std::cout << "-------------------------------------------\n";
std::cout << "验证结果 (Verification Results):\n";
std::cout << "-------------------------------------------\n";
std::cout << "Q^T * Q 误差 (Orthogonality Error) : " << max_err_qtq << "\n";
std::cout << "Q * R 误差 (Reconstruction Error): " << max_err_qr << "\n";
if (max_err_qtq < 1e-4 && max_err_qr < 1e-4) {
std::cout << "=> 测试通过!(TEST PASSED!)\n";
} else {
std::cout << "=> 测试失败!(TEST FAILED!)\n";
}
}
int main() {
const int m_per_block = 256; // 每个 Block 处理的行数
const int n = 32; // 列数
const int num_blocks = 128; // 并发任务数
const int total_m = m_per_block * num_blocks; // 总行数 (32768)
const int lda = total_m;
std::cout << "===========================================" << std::endl;
std::cout << "TSQR Batched Performance Test (RTX 4060)" << std::endl;
std::cout << "Total Matrix: " << total_m << " x " << n << std::endl;
std::cout << "Parallel Blocks: " << num_blocks << " (Each 256x32)" << std::endl;
std::cout << "===========================================" << std::endl;
size_t a_size = total_m * n * sizeof(float);
size_t r_batch_size = num_blocks * n * n * sizeof(float);
std::vector<float> h_A(total_m * n);
std::mt19937 rng(1234);
std::uniform_real_distribution<float> dist(-1.0f, 1.0f);
for (int i = 0; i < h_A.size(); ++i) h_A[i] = dist(rng);
std::vector<float> h_A_orig_first(m_per_block * n);
for (int j = 0; j < n; ++j) {
for (int i = 0; i < m_per_block; ++i) {
h_A_orig_first[i + j * m_per_block] = h_A[i + j * total_m];
}
}
float *d_A, *d_R;
CHECK_CUDA(cudaMalloc(&d_A, a_size));
CHECK_CUDA(cudaMalloc(&d_R, r_batch_size));
CHECK_CUDA(cudaMemcpy(d_A, h_A.data(), a_size, cudaMemcpyHostToDevice));
cudaEvent_t start, stop;
CHECK_CUDA(cudaEventCreate(&start));
CHECK_CUDA(cudaEventCreate(&stop));
dim3 block(32, 32);
dim3 grid(num_blocks);
std::cout << "Scaling up: Launching " << num_blocks << " blocks..." << std::endl;
CHECK_CUDA(cudaEventRecord(start));
// tsqr_n32_float_simple<<<grid, block>>>(total_m, d_A, lda, d_R, n);
tsqr_n32_float<<<grid, block>>>(total_m, d_A, lda, d_R, n);
CHECK_CUDA(cudaEventRecord(stop));
CHECK_CUDA(cudaEventSynchronize(stop));
float ms = 0;
CHECK_CUDA(cudaEventElapsedTime(&ms, start, stop));
double single_block_flops = 2.0 * m_per_block * n * n - (2.0/3.0) * n * n * n;
double total_flops = single_block_flops * num_blocks;
double gflops = (total_flops * 1e-9) / (ms * 1e-3);
printf("-------------------------------------------\n");
printf("统计结果 (Performance Statistics):\n");
printf("-------------------------------------------\n");
printf("Kernel 耗时 : %.4f ms\n", ms);
printf("总计算量 : %.2f MFLOPs\n", total_flops / 1e6);
printf("吞吐性能 : %.2f GFLOPS\n", gflops);
std::vector<float> h_Q_first(m_per_block * n);
std::vector<float> h_R_first(n * n);
std::vector<float> h_Q_all(total_m * n);
CHECK_CUDA(cudaMemcpy(h_Q_all.data(), d_A, a_size, cudaMemcpyDeviceToHost));
CHECK_CUDA(cudaMemcpy(h_R_first.data(), d_R, n * n * sizeof(float), cudaMemcpyDeviceToHost));
for (int j = 0; j < n; ++j) {
for (int i = 0; i < m_per_block; ++i) {
h_Q_first[i + j * m_per_block] = h_Q_all[i + j * total_m];
}
}
verify_qr_decomposition(h_A_orig_first, h_Q_first, h_R_first, m_per_block, n);
CHECK_CUDA(cudaEventDestroy(start));
CHECK_CUDA(cudaEventDestroy(stop));
cudaFree(d_A);
cudaFree(d_R);
return 0;
}