
分布式系统第四章
分布式互斥
目的:仅基于消息投递,实现对资源的互斥访问。
应用层协议规定
- enter():进入临界区。
- resourceAccess():在临界区访问共享资源。
- exit():离开临界区。
基本要求
- 安全性:在临界区内一次最多有一个进程可以执行。
- 活性:进入和离开临界区的请求最终成功执行。
- 顺序:进入临界区的顺序和进入请求的happen-before顺序一致。
性能评价
- 带宽消耗:每个enter和exit操作中发送的消息数。
- 客户延迟:进程进入、退出临界区的等待时间。
- 同步延迟:一个进程离开临界区和下一个进程进入临界区之间的延迟。
中央服务器算法(Central Server)
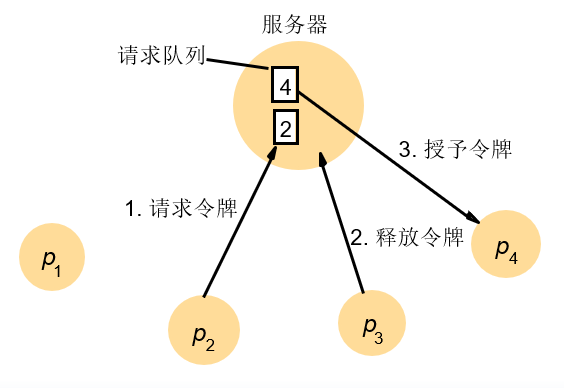
基本要求
满足安全性和活性要求,但不满足顺序要求,异步系统请求顺序无法保证in order.
性能评价
- 带宽消耗
- enter: 2个消息,请求和授权
- exit:1个消息,释放消息
- 客户延迟
- enter:request+grant = 1 round-trip.
- exit: release
- 同步延迟
- 一个消息的往返时间:1 release + 1 grant.
基于环的算法(Ring-based)
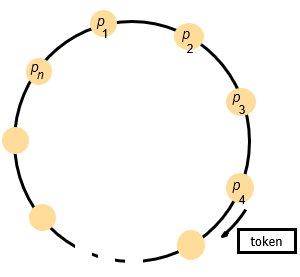
传递令牌。
基本要求
满足安全性和活性要求,不满足顺序要求。
性能评价
- 带宽消耗:由于令牌的传递,会持续消耗带宽。
- 客户延迟:
- Min:0个消息,请求时刚好有令牌。
- Max:N个消息,请求前刚投递令牌。
- 同步延迟:
- Min:1个消息,进程一次进入临界区。
- Max:N个消息,一个进程连续进入临界区。
基于组播和逻辑时钟的算法(Multicast & LC)
进程进入临界区需要所有其他进程的同意:组播+应答。
采用Lamport clock避免死锁。
1 | |
基本要求
满足安全性、活性和顺序要求。
性能
- 带宽消耗
- ,即(N-1)个请求,(N-1)个应答。
- 客户延迟
- 1 round-trip
- 同步延迟
- 一个消息的传输时间。
Maekawa投票算法
进程进入临界区不需要所有进程统一:
- 每个进程都有一个选举集.
- 选举集包含多个进程。
- 每个进程处于自己的选举集中。
- ,任意两个选举集有交集。
- ,所有选举集大小一致,保证公平性。
- 每个进程pj出现在M个选举集中。
1 | |
死锁问题
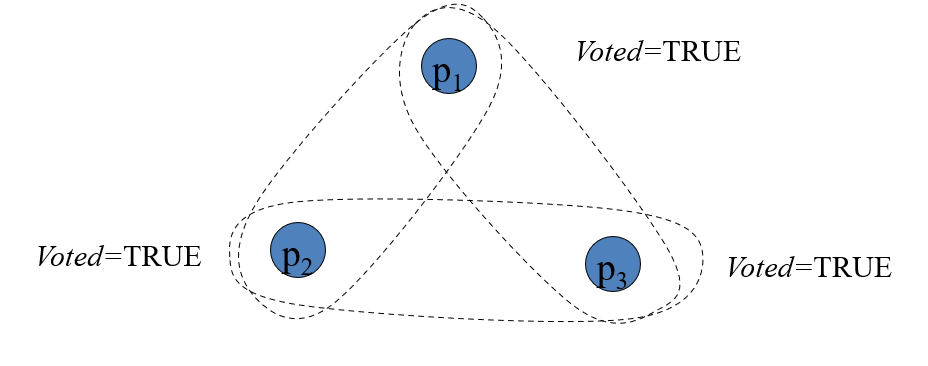
进程p1、p2和p3,且V1={p1, p2}, V2={p2, p3}, V3={p3, p1}.
若三个进程并发请求进入临界区,分别应答了自己,但无法获得另一个进程的回复,进入死锁。
基本要求
改进后的投票算法可满足安全性、活性和顺序性。
性能
- 带宽消耗
- 进入需要个消息。
- 退出需要个消息。
- 客户延迟
- 1 round-trip
- 同步延迟
- 1 round-trip (release + vote)
选举
基础概念
- 选举算法:选择一个唯一的进程来扮演特定角色的算法。
- 召集选举:一个进程启动了选举算法的一次运行。
- 参与者:进程参加了选举算法的某次运行。
- 非参与者:进程当前没有参加任何选举算法。
- 进程标识符:唯一且可按全序排列的任何数值。
基本要求
- 安全性:参与进程Pi的领导者信息要么是空的,要么是当前所有可用者中pid最大的进程。
- 活性:所有进程Pi都参加,并且最终使得或进程Pi崩溃。
性能评价
- 带宽消耗:与发送消息的总数成比例。
- 周转时间:从启动算法到终止算法之间的串行消息传输的次数。
基于环的选举算法(Ring-base ELection)
目的:在异步系统中选举具有最大标识符的进程作为协调者。
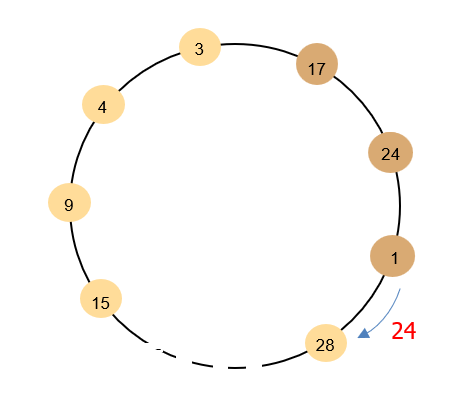
按逻辑换排列一组进程,id不必有序。
1 | |
性能
周转时间
- 最坏情况:3N-1个消息。
- 最好情况:2N个消息。
不具备容错功能
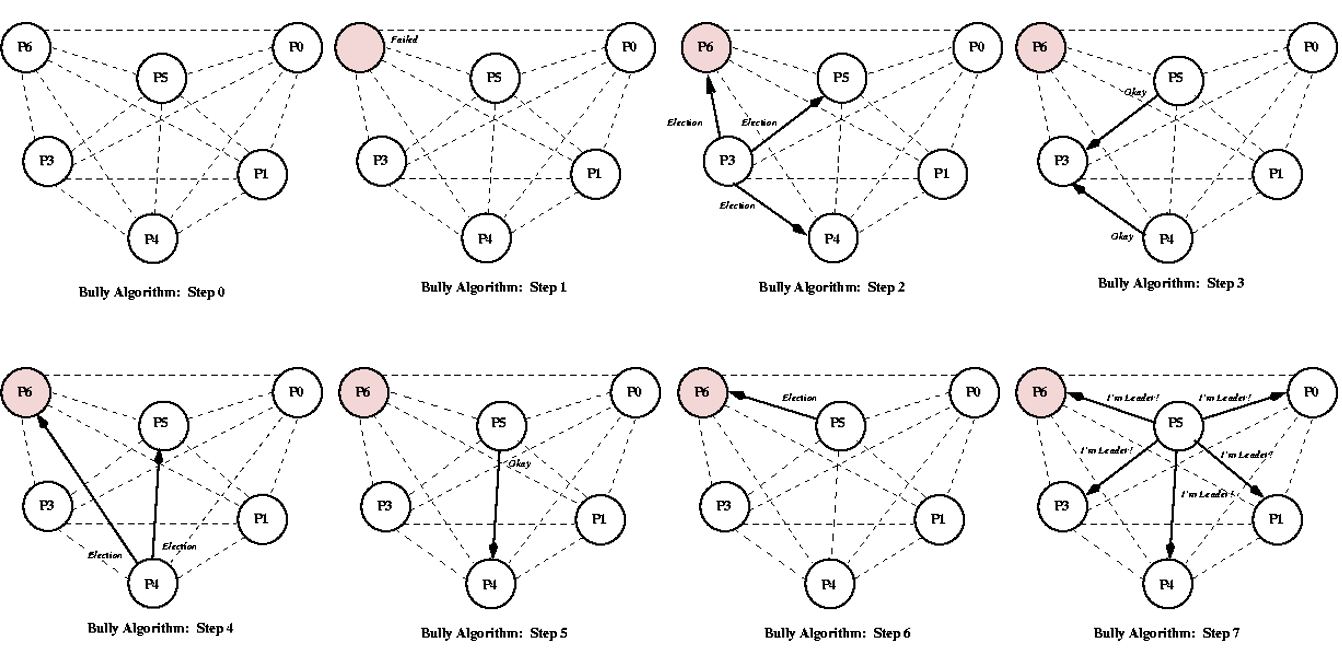
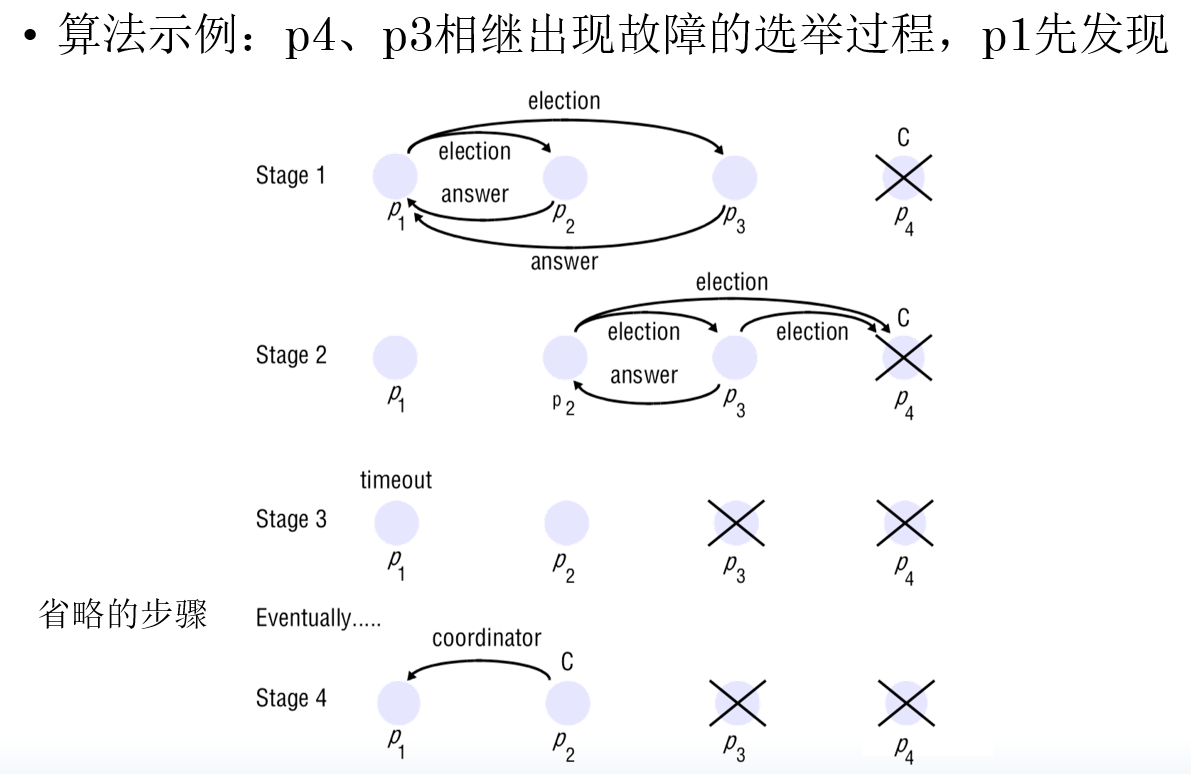
霸道算法(Bully Election)
- 同步系统,使用超时检测进程故障。
- 通道可靠,但运行进程崩溃。
- 每个进程知道那些进程具有更大的标识符。
- 每个进程均可以和所有其他进程通信。
任一进程P发现故障,召集选举:
- 发送选举消息election至所有更大标识符的进程(含故障进程)
- 若P没有收到应答消息,则给所有具有较小标识符的进程发送协调者消息。
- 若P收到应答消息,则等待协调者消息。
- 若等待超时,启动一次新的选举算法。
接收到election消息:
- 回复应答消息answer.
- 开启另一次选举。
进程收到协调者信息:
- 设置
优化召集选举流程:
- 最大ID进程或除故障进程以外的最大ID进程发送协调者消息。
- 非最大ID进程发送选举消息至所有更大标识符的进程。
其余过程一致。
性能
- 带宽消耗
- 最好情况:,标识符次大的进程发起选举。
- 发送N-2个协调者信息。
- 周转时间为1个消息。
- 最坏情况:,标识符最小的进程发起选举。
- 周转时间=依次elect(N-2)+协调。
- 最好情况:,标识符次大的进程发起选举。
组播通信
基础概念
- 组播:发送一个消息给进程组中的每个进程。
- 广播:发送一个消息给系统中的所有进程。
- 系统模型
- multicast(g, m):进程发送消息给进程组g的所有成员。
- deliver(m):投递由组播发送的消息到调用进程。
- 进程组
- 封闭组:只有组的成员可以组播到该组。
- 开放组:组外的进程也可向该组发送消息。
组播面临的挑战
- 效率
- 带宽
- 总传输时间
- 投递保证
- 可靠性
- 顺序
- 进程组管理
- 进程可任意加入或退出进程组
基本组播(reliable channel)
- B-multicast(g, m):对每个进程.
- 进程p receive(m)时:p执行B-deliver(m).
- 只要发送者没有崩溃,任何正确(不崩溃)的进程最终都会执行操作,即:最终会将消息 提交给本地应用程序。
可靠组播R-multicast/R-deliver
特点
- 完整性:一个正确的进程p投递一个消息m至多一次。
- 有效性:如果一个正确的进程组播消息m,那么它终将投递m.
- 协定:如果一个正确的进程投递消息m,那么group中其他正确的进程终将投递m.
与B-multicast的区别
- B-multicast不保证协定
- R-multicast结果一致,要么全部,要么全不
用B-multicast实现可靠组播
1 | |
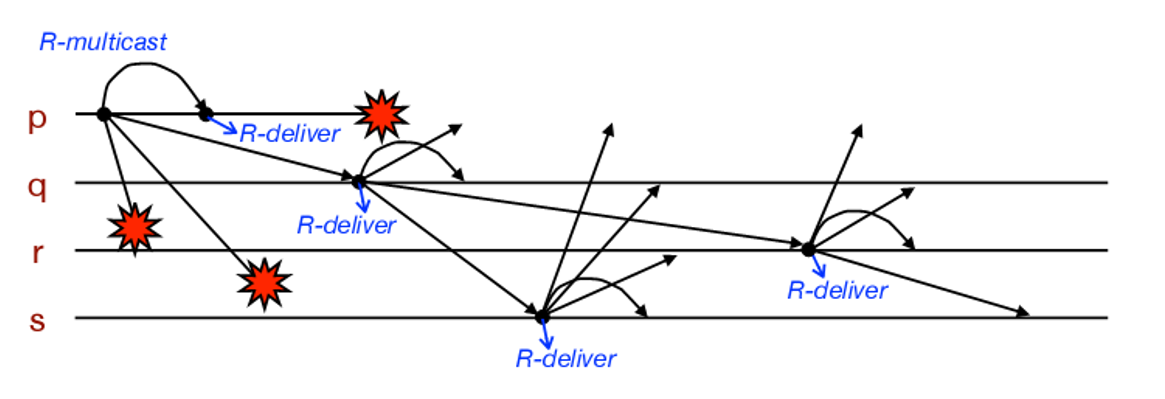
算法评价:
- 满足完整性:重复消息过滤
- 满足有效性:一个正确的进程终将B-deliver消息到他自己。
- 遵循协定:每个正确的进程在B-deliver消息中都B-multicast该消息到其他进程。
- 效率低:每个消息被发送到每个进程次,累计次。
用IP组播实现可靠组播
将IP组播、捎带确认法和否定确认相结合:
- 基于IP组组播:IP组播通信通常是成功的。
- 捎带确认:在发送给组中的消息中捎带确认。
- 否认确认:进程检测到有遗漏消息,发送单独的应答或请求消息。
1 | |
算法评价:
- 完整性:通过检测重复消息和IP组播性质实现。
- 有效性:仅在IP组播具有有效性时成立。
- 协定:需要进程无限组播消息并无限保留消息副本,这并不现实。
统一性质
- 统一性质:无论进程是否正确都成立的性质。
- 统一协定:如果一个进程投递消息m,不论该进程是正确的还是出故障,在group(m)中的所有正确的进程终将投递m.
统一协定允许一个进程在投递一个消息后崩溃。
有序组播
排序
- FIFO排序:如果一个正确的进程发出multicast(g,m),然后发出multicast(g, m’),那么每个投递m’的正确的进程将在m’前投递m.
- 因果排序:如果mutlicast(g,m)->multicast(g,m’),那么任何投递m’的正确进程将在m’前投递m.
- 全排序:如果一个正确的进程在投递m’前投递消息m,那么其它投递m’的正确进程将在m’前投递m.
实现FIFO排序
- 基于序号实现。
- 与基于IP组播的可靠组播类似,采用Sg Pg和保留队列。
实现因果排序
每个进程维护自己的向量时钟:
- CO-multicast:在向量时钟的相应分量上加1,附加VC到消息。
- CO-deliver:根据时间戳递交消息。
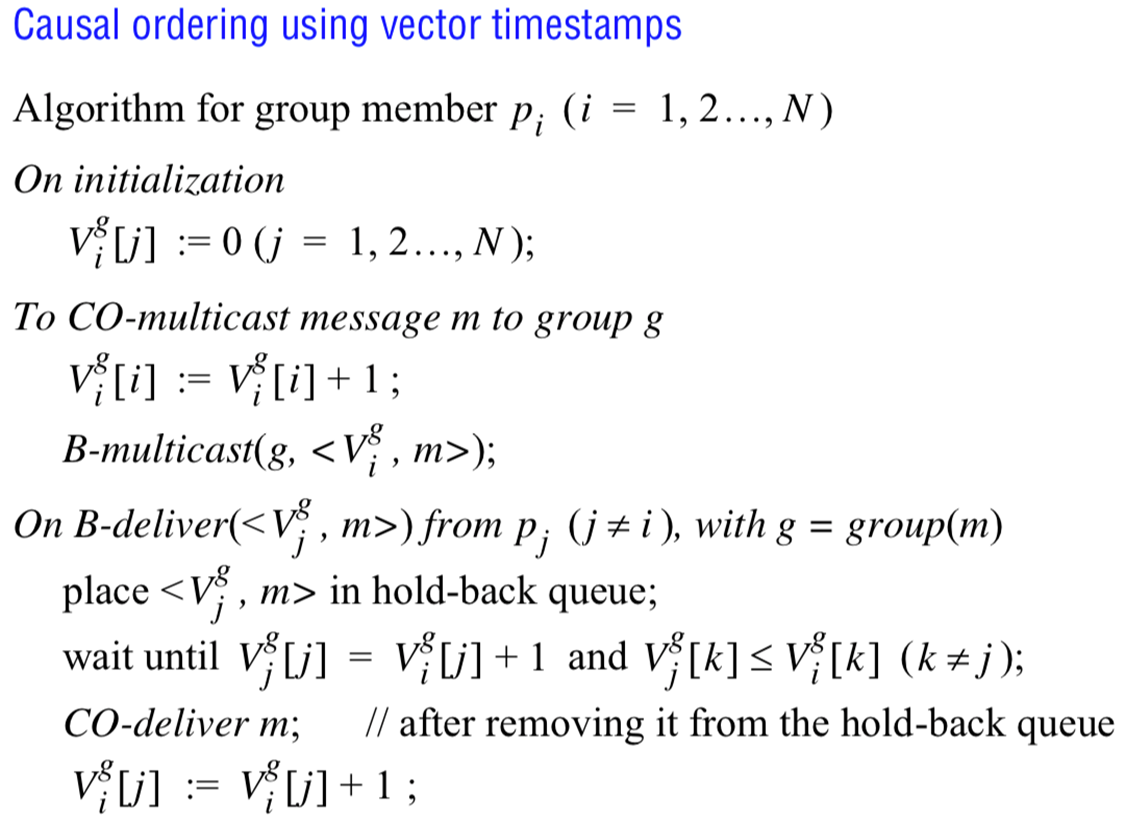
因果依赖:
含义: 知道的、来自任何其他进程 的消息总数()必须至少达到 在发送 之前所知道的来自 的消息总数()。
保证: 如果消息 是由 在接收了某个 的消息 之后才发出的,那么 必须先接收并投递 之后,才能投递 .
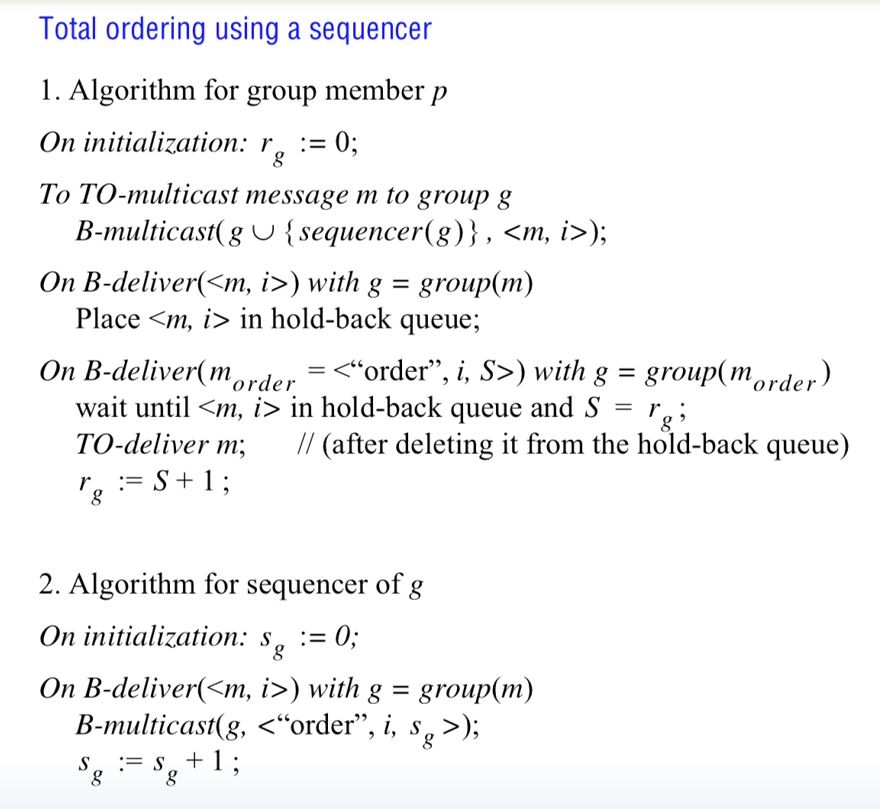
实现全排序
为组播消息指定全排序标识符,以便于进程基于这些标识符做出相同的排序决定。
定序器实现全排序:
ISIS算法:
- 进程维护的关键信息
- Ag.q:进程q观察到的组g中最大的、已经被所有进程认可的协定序号。
- Pg.q:进程q自己提出的最大序号。
- 提议阶段
- 进程p将原始消息m组播到组g。
- 每个接收消息m的进程q提议序列号:
- 进程q检查它已知的最大协定序号Ag.q和它自己提出的最大提议序号Pg.q,然后取两者的最大值加1作为针对这条新消息m的提议序号。Pg.q = max(Ag.q, Pg.q) + 1.
- 把Pg.q添加到消息m,并把m放入有序保留队列。
- 用序号Pg.q回复进程p.
- 协定阶段
- 进程p手机所有进程提出的Pg.q.
- 选择最大的数作为下一个协定序号,并组播该序号。
- 收到序号的进程设置Ag.q为新的最大值,并将该序号附加到指定消息上,在保留队列进行重排序,最后转到投递队列。
共识和相关问题
共识问题
一个或多个进程提议一个值后,使得进程对这个值达成一致意见。
在网络可靠但允许节点失效的最小异步模型系统中,不存在可以解决一致性问题的共识算法。
共识算法的基本要求
- 终止性:每个正确的进程最终设置它的决定变量。
- 协定性:如果pi和pj是正确的,且已进入决定状态,那么di=dj.
- 完整性/有效性:如果正确的进程都提议了同一个值,那么处于决定状态的任何正确进程将选择该值。
共识算法
过程
- 每个进程组播它的提议值。
- 每个进程收集其他进程的提议值。
- 每个基础计算func(v1, v2, …, vN).
性质
- 终止性:由组播操作的可靠性保证。
- 协定性和完整性:由func的定义与组播操作的完整性保证。
拜占庭将军问题
3个或更多将军协商是进攻还是撤退,1个将军(司令)发布命令,其他将军(中尉)决定进攻或撤退,一个或多个将军可能会叛变,所有未叛变的将军执行相同的命令。
与共识问题的区别:
一个独立的进程提供一个值,其他进程决定是否采用。
算法要求:
- 终止性:每个正确进程最终设置它的决定变量。
- 协定性:所有正确进程的决定值都相同。
- 完整性:若司令正确,则所有正确进程采用司令提议的值。
交互一致性问题
每个进程提议一个值,就向量的值达成一致。
决定向量:向量中的每一个分量与一个进程的值对应。
算法要求:
- 终止性:每个进程最终都会设置它们的决定向量。
- 协定性:每个正确的进程决定向量一致。
- 完整性:如果pi是正确进程,那么所有正确的进程都把vi作为他们决定向量中第i个分量。
同步系统中的共识问题
在由N个进程组成的同步系统中,每个进程有一个初始值,但系统中可能出现进程崩溃故障,崩溃的进程不超过f个。
设计一个算法,让所有未崩溃的进程最终对一个值达成一致。
- 初始化阶段
- 每个进程维护一个集合
- 该集合是众多小集合的集合。
- 每个小集合代表了一轮中出现的数值。
- 每个进程维护一个集合
- 每一轮
- 组播操作
- 每个进程通过向组g广播上一轮新增的、本进程没发过的数值;即.
- 将上一次的Values集合作为本轮记录数值的初始状态;.
- 接收合并
- 每个进程合并来自其他进程传来的,和进行并集操作.
- 组播操作
- 最终决策:f+1轮后,选择作为最终的决定值。
算法满足终止性、协定性和完整性。
Paxos共识问题
目标:让一组进程就一个值达成一致。
要求
- 安全性
- 只有曾经提出的值,能被选择作为最终的结果。
- 决定值仅有1个。
- 进程不会误以为某个值被选择。
- 活性
- 一定有一个值被选中。
- 如果某个值被选中了,所有正常进程一定知道。
算法假设
- 系统同步性:分布式系统可以是部分同步的,甚至是异步的。
- 通信信道是不可靠的。
- 损坏的信息可被检测并忽略。
- 进程只会出现崩溃故障。
设计目标
- 只保证正确性,不考虑性能。
- 容忍故障且不阻塞,只要多数进程正常工作,算法就能进行。
角色
Quorum(仲裁集):Paxos通过多数节点同意来推进共识。
- Client:发起请求,是共识需求的出发者。
- Proposers:接收Client的请求,运行Paxos协议,推动集群内所有节点对请求达成一致。【推动流程】
- Acceptors:维护协议的状态,通过法定人数(Quorum)的同意来确认提议。【确认一致性】
- Learners:从多数Acceptors处获取以达成的共识结果,执行请求并向Client返回响应。【完成结果落地】
单个节点可同时承担多个角色。
角色的分工是Paxos实现崩溃容错公式的基础。
提议
提议是由Proposer提出的共识候选内容,由“唯一编号+提议值”组成。
算法流程
- 准备阶段:让提议者获取多数接受者的承诺。
- 提议者:选择一个唯一的提议编号n,向多数接受者发送Prepare请求。
- 接受者:若收到的n大于自己之前响应过的所有Prepare请求编号:
- 承诺不再接受编号小于n的提议。
- 返回自己已接受的编号最大的提议(若有)。
- 接受阶段:让提议者的提议被多数接受者确认,完成共识。
- 提议者:若多数接受者对Prepare请求相应,则向这些接受者发送Accept请求。
- 提议编号为n.
- 提议值v:若响应中包含已接受的提议,取其中编号最大的提议的值;若没有,则用自己的初始值。
- 接受者:若收到编号为n的Accept请求,且未响应过编号大于n的Prepare请求,则接受该提议。
- 提议者:若多数接受者对Prepare请求相应,则向这些接受者发送Accept请求。
潜在问题
编号为N的提议失败的原因:
- 接受者已对更大编号的提议做出承诺。
- 提议者在准备阶段或接受阶段未收到多数接受者的响应。
提议失败后,算法会使用更大的提议编号重新启动流程,若多个提议者都在重试,就可能出现相互抢占编号,持续拒绝对方提议的情况。
出现活锁。