分布式系统第三章
时钟、事件和进程状态
假设每个进程在单处理器上执行,处理器之间不共享内存,进程之间只能通过消息进行通信。
- 进程状态
- 所有变量的值
- 相关的本地操作系统环境中的对象的值
- 事件:一个通信动作或进程状态转换动作。
- 进程历史:在进程中发生的一系列事件,按发生在先排序。
- 计算机时钟:晶体具有固定的震荡频率。
- 硬件时钟:.
- 软件时钟:.
同步物理时钟
外部同步
采用权威的外部时间源。
时钟在范围内是准确的:
内部同步
无外部权威时间源,系统内时钟同步。
时钟在范围内是准确的:
若(时钟集合)在范围内外部同步,则在范围内内部同步。
时钟正确性
基于偏移率:
其中:描述了现实实际流失时间,描述了系统的流失时间,是偏移率。
基于单调性:
保证了时钟读数总是前进的。
基于混合条件:单调性+偏移率有界+同步点跳跃前进。
同步点跳跃前进是指:当进行时钟点同步时,调整后的时钟读数必须比调整前的读数大,即跳跃地向前调整。
时钟故障
- 崩溃故障:时钟完全停止滴答。
- 随即故障。
同步系统中的同步
已知时钟偏移率范围,存在最大的消息传输延迟,进程每一步的执行时间已知。
若一个进程将时间t传送至另一个进程,消息传递的时间不确定性为.
- 设置最早到达时间:,则时钟偏移至多为.
- 设置最晚到达时间:,则时钟偏移可能为.
- 设置为中间值(最佳策略):,则时钟偏移至多为.
Cristian方法
应用条件:
- 存在时间服务器,作为外部时间源。
- 消息往返时间与系统所要求的精度相比足够短。
协议:
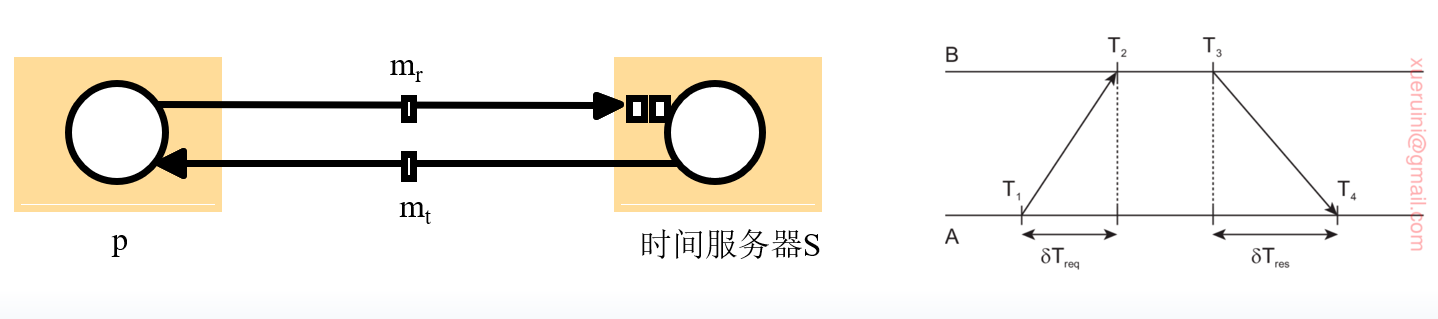
往返时间:
- 进程p向时间服务器发送同步请求,并记录本地时间.
- 进程p接收到服务器回复的,并记录本地时间.
- .
设置时钟.
精度计算:
- 假设消息的传输延迟均为最短时间,最小值为.
- 如果总往返时间是,并且知道单项延迟至少是,那么单向延迟的最大值是.
- 回复消息的真实到达时间落在一个不确定区间.
- 最大误差为.
理想状态下,若,则误差为0. 也就是说,如果网络延迟非常稳定,且总是最小值,我们就能实现完美的同步.
Berkeley方法
- 参与者时钟精度相近。
- 主机周期轮询从属机时间。
- 主机计算容错平均值。
- 主机发送每个从属机的调整量。
网络时间协议(NTP)
优点:
- 可外部同步:跨Internet的用户能够与UTC精确同步。
- 高可靠性:能够处理连接丢失,利用冗余服务器、路径等。
- 扩展性好:大量用户可经常同步,以抵消偏移率的影响。
- 安全性强:防止恶意或偶然的干扰。
协议的核心思想是构建一个分层的、具有弹性的时间同步网络,以确保整个分布式都能获得准确的时间。
协议结构:层次结构,每个较低层级的服务器都从其上一层级的服务器获取时间;层级号表示该设备距离权威时间源的条数,层级号越低,时钟精度越高。
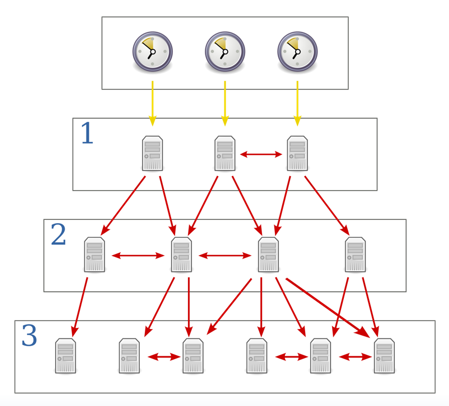
同步网络结构是动态和容错的,如果某个时间服务器发生故障,或者网络路径变化,子网可以自动重新选择并连接到新的可用的上层服务器进行同步。
同步模式:
- 组播模式
- 适用于高速LAN。
- 准确度低,但效率高。
- S/C
- 类似于Cristian。
- 准确度高于组播。
- 对称模式
- 保留时序信息。
- 准确度最高。
精度分析:
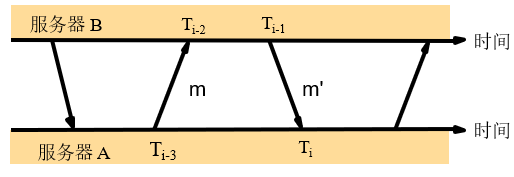
若m m’传输消息的时间延迟为,为B时钟相对于A时钟的实际偏移,为偏移估计,为总延迟估计,则
计算时假设:
那么.
:
逻辑时间和逻辑时钟
为什么需要逻辑时间
- 节点具有独立时钟,缺乏全局时钟,后发生的事件有可能被赋予较早的事件标记。
- 分布式系统的物理时钟无法完美同步。
- 事件排序是众多分布式算法的基石。
逻辑时钟
众多应用只要求所有节点具有相同时间基准,该时间不一定与物理时间相同。
背景
两个基本事实:
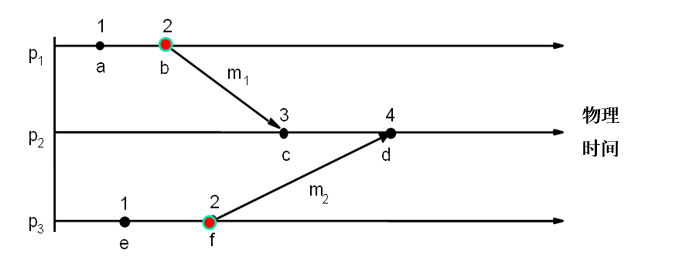
- 同一进程中先后两个事件存在关系 。
- 任一消息的发送事件发生在该消息的接收事件之前。
发生在先 关系定义:
- 若存在进程pi满足, 则.
- 对于任一消息m,存在.
- 若事件满足和,则.
并发关系定义:表明和均不成立,则X Y是并发的。
Lamport时钟
机制
- 进程维护一个单调递增的软件计数器,充当逻辑时钟。
- 用逻辑时钟为事件添加时间戳。
- 按事件的时间戳大小为事件排序。
逻辑时钟修改规则
- LC1:进程pi执行事件前,逻辑时钟.
- LC2
- 进程pi发送消息m时,在m中添加时间戳.
- 进程pj在接收(m,t)时,更新,执行LC1,即给事件recv(m)添加时间戳,即.
不同进程产生的消息可能具有相同数值的Lamport时间戳。
全序逻辑时钟
引入进程标识符创建时间的全序关系。
若e e’分别为pi pj发送的时间,则全局逻辑时间戳分别为.
优先比较T,随后比较i j.
这样系统中各个事件Lamport时间戳均不相同。
缺陷
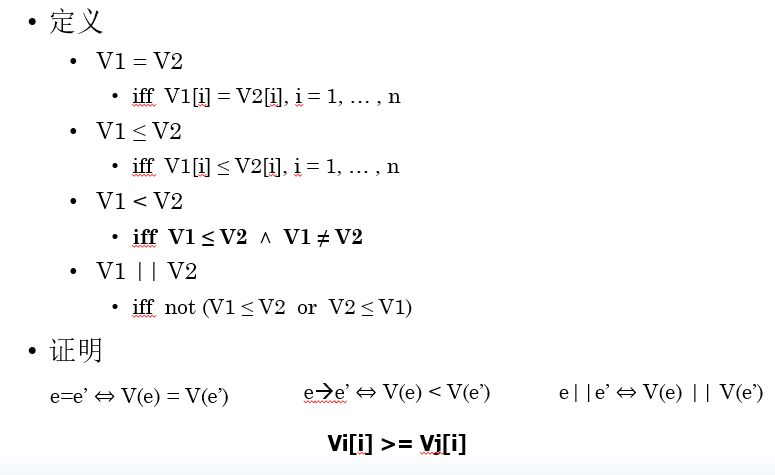
Lamport时钟不具备性质:若 则 .
因为他没有捕获事件的因果关系。
向量时钟
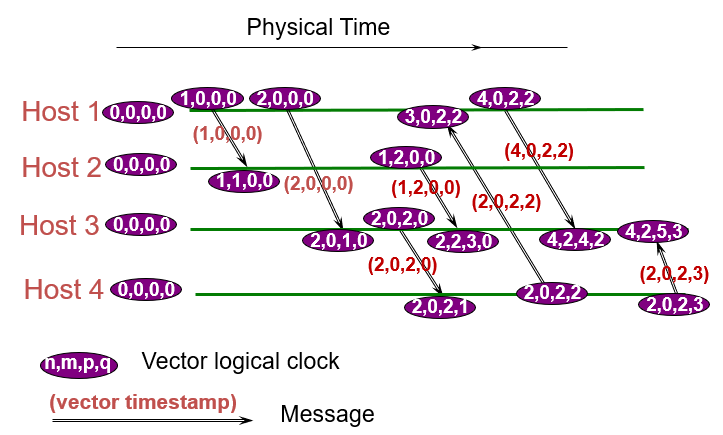
机制
每个进程维护自己的向量时钟:
- VC1:初始情况,.
- VC2:在pi给事件加时间戳之前,设置.
- VC3:pi在它发送的每个消息中包含.
- VC4:当pi接收到消息中的时间戳t时,设置,取两个向量时间戳的最大值,该操作称为合并。
需注意,与Lamport时钟不同,这里会提前+1.
性质
全局状态
为什么需要观察全局状态
- 收集分布式无用单元
- 基于对象的引用计数
- 考虑信道和进程的状态
- 分布式死锁检测
- 观察系统中的等待关系图是否存在循环
- 分布式终止检测
- 分布式调试
全局状态和一致割集
- 进程的历史.
- 进程历史的有限前缀h_i^k=
- 全局历史:单个进程历史的并集。
- 进程状态:pi进程在第k个事件发生之前的状态。
- 全局状态:.
- 割集,系统全局历史的子集:.
- 割集的一致性
- 对于所有事件那么.
- 但如果e不属于C,f属不属于C都可以。
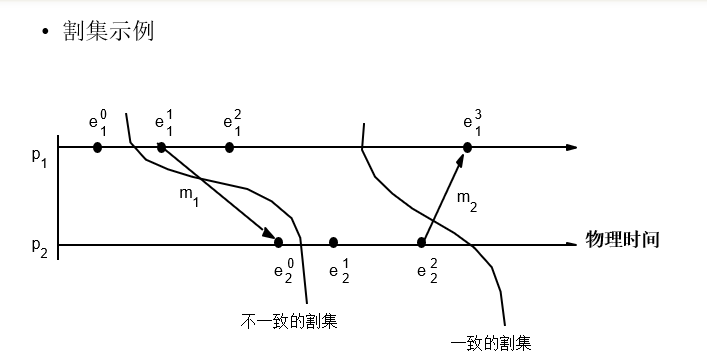
一致的全局状态对应于一致割集的状态。
走向:事件全序
- 系统的一种可能执行过程。
- 本事是系统所有事件的一个全序排列,但每个进程自己的本地执行顺序保持一致。
- 并非所有走向都会经过一致的全局状态。
线性化走向:仅经过一致的全局状态,每一步都对应一致割集。
Chandy和Lamport的快照算法
- 目的:捕获一致的全局状态。
- 假设:
- 进程和通道均不会出现故障。
- 单向通道,提供FIFO顺序的消息传递。
- 进程之间存在强连通关系。
- 任一进程可在任一时间开始全局拍照。
- 拍照时,进程可继续执行,并发送和接收消息。
快照算法通过以下元素描述系统状态
- 接入通道+外出通道:记录进程之间的消息传递链路;
- 进程状态+通道状态:系统的全局状态由每个进程的本地状态+每个通道中未送达的消息状态共同组成;
核心工具:标记消息
- 标记消息是触发和完成快照的关键。
- 标记接收规则:进程受到标记后,需先记录自己的当前状态,之后在发送任何消息前,必须发送一个标记,并同时记录接入通道中尚未处理的消息。
- 标记发送规则:若进程还未记录自身状态,受到标记后需立即记录状态,清空通道。
算法过程
- 发起者启动快照:
- Pi先记录自己的本地进程状态;
- 对自己的每一个外出通道,在发送其他消息前,先发送 “标记消息”。
- 其他进程接收标记并响应:当任意进程Pj从通道c收到标记消息时:
- 若Pj未记录状态:
- 记录自己的本地进程状态;
- 将通道c的状态记为 “空集”(因为标记是通道c的第一个 “信号”,说明标记到达前通道无未处理消息);
- 对自己的所有外出通道,发送标记消息(继续触发其他进程的快照);
- 开始记录后续从其他接入通道收到的消息(用于捕获这些通道的状态)。
- 若Pj已记录状态:
- 将通道c的状态记为 “从Pj记录状态后,在c上收到的所有消息”(即捕获通道c在快照过程中的未处理消息)
- 若Pj未记录状态:
实例
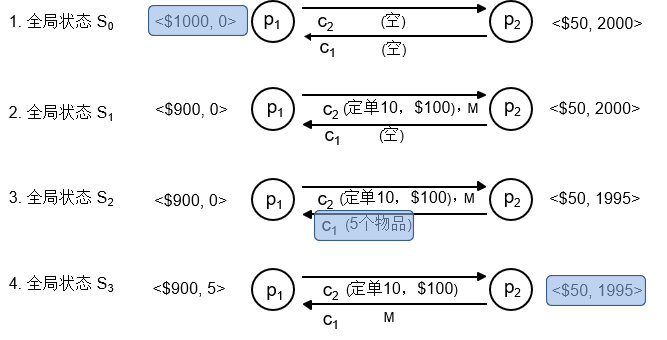
- 对p1来说,在发出M前,记录本地状态未<$1000,0>.
- p2随后传递5个物品至p1,此时c1 c2均有消息在传递。
- 下一时刻,标记消息已经从p1传递至p2,p2记录此刻的状态<$50, 1995>. 并回传给p1一个标记信息M,并清空c2记录为空集。
- p1接收到标记信息后,记录从它发出信息(记录本地状态开始)时的所有c1收到的信息c1:<5个物体>。
最后状态为: p1<1000, 0>, p2<50, 1995>, c1:<5itmes>, c2<>.
算法终止分析
假设一个进程已经收到了一个标记信息,在有限的时间内记录了它的状态,并在有限的时间里通过每个外出通道发送了标记信息。
若存在一条从进程pi到进程pj的信道,那么pi记录它的状态之后的有限时间内,pj将记录它的状态(收到pi的标记信息)。
一些进程记录它的状态之后的有限时间内,所有进程都会记录它们的状态和接入通道的状态。
每个进程收到它在所有的输入通道上的标记后终止。
简单来说,就是每个进程的所有输入通道都收到了标记,算法终止。
快照算法记录的全局状态是一致的。
全局状态谓词
从系统P的进程全局状态集映射到true, false的函数。
稳定的谓词:一旦系统进入谓词为true的状态,它将在所有可从该状态可达的状态中一致保持true.
分布式系统需要满足以下两个要求:
- 安全性:对于从初始状态S₀出发可到达的所有状态S,代表坏情况的谓词P_bad的取值都是False.
- 活性:对所有从初始状态出发的执行过程,代表好情况的谓词P_good最终会变为True.
分布式调试
目的:对系统实际执行总的暂态做出判断,如安全条件检测,控制系统。
这话说的很傻逼,实际上就是判断某一个特殊状况是否出现过,比如死锁、资源耗尽等特殊情况。
谓词是一类状态的描述,我们判断谓词实际上判断是否符合某一条件的状态出现过
方法:
- 监控器进程手机进程状态信息。
全局谓词判断
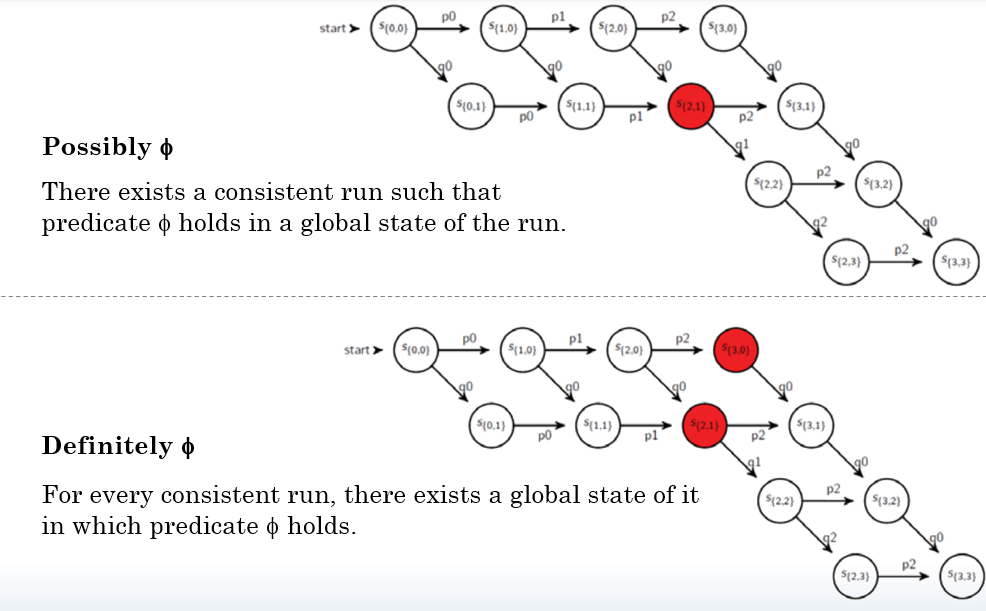
可能的
存在一个一致的全局状态S,H的用一个线性化走向经历了这个全局状态S,而且该S使得为True.
实际上就是说,这个H只要有一个线性化走向经过了S,这个S使得谓词为真,那么这个S就是可能发生的。
明确的
对于H的所有线性化走向L,存在L经历的一个一致的全局状态S,而且该S使得为True.
这个话也是傻逼说的,实际上就是H的任何线性化走向,都会经历一个S符合谓词为true的情况,哪怕S并不是一模一样。
观察一致的全局状态
前提:进程的状态信息附有向量时钟.
定义: 是从监控器进程接收到的所有进程状态组成的一个全局状态。 是一致的全局状态当且仅当:
其中V是向量时钟。
记住:
对于任意进程 ,快照中的所有其他进程 在快照 中声称看到的来自 的事件数 (),绝不能多于 自己在快照 中记录的事件数 ()。